
残念なドライバーズパレード開始前からずっと立ったままT11で場所取りしていて疲れた我々は、ここで決勝最初の数ラップを観てから、自席のあるBay Grandstandへと移動します。頭上から降ってくる毛虫にもイライラ。iPhone 6で流さずに撮影するとこんな感じになります。

1/250秒で真横から流し撮り。マニュアルフォーカスで置きピン。ISOが設定上限の5000になっていて、画像はかなりノイジーになりました。
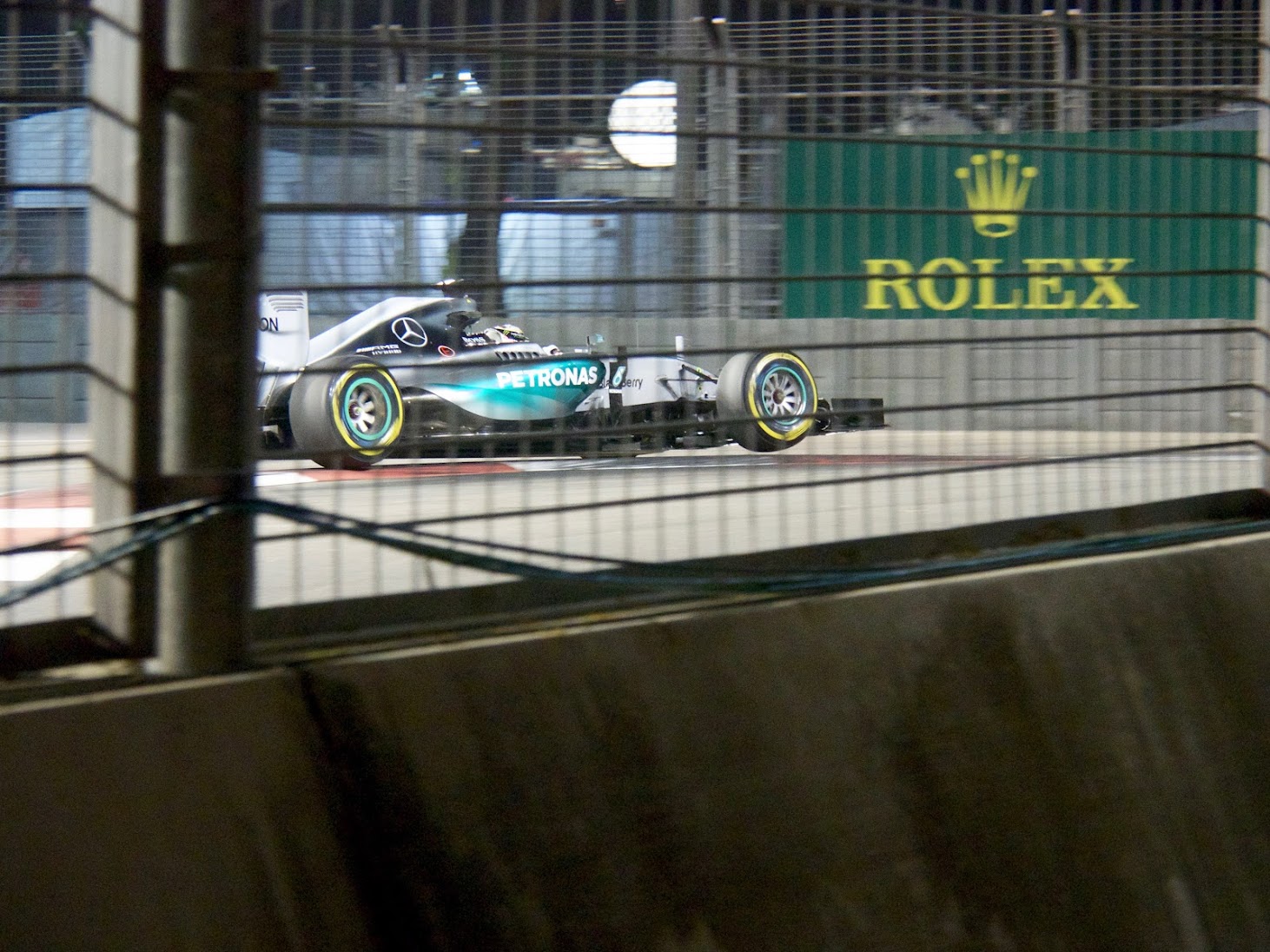
不調だったMercedesのマシン。T11の縁石に乗り上げて右フロントが浮いています。

好調のFerrari。

来期のパワーユニットを供給するメーカーが未定のToro Rosso。シンガポールでは二台のマシンがポイントを獲得しています。

T11からT18へと移動中にMassaとHulkenbergのクラッシュでセーフティーカーが出動。自席に到着すると、今度は人がトラック内に侵入し、再びセーフティーカー登場でイエローフラッグ。

今回のシンガポールGPで使用したOlympus OM-D E-M5 Mark IIには236万ドットの超大型高精細EVFが搭載されており、初期のEVFとは比較にならないほど、くっきりと見やすい電子ビューファインダーです。しかしながら至近距離で高速で移動するF1マシンの流し撮りをする時は、私の設定ミスなのか、被写体が追従してくれません。どうしても遅れがちになるので、視野の中央でシャッターをリリースしながらカメラを振っているにもかかわらず、狙った被写体は視野の外であったり、上の画像のように右端に辛うじて捉えていたりと…流し撮りには不向きであるという印象を持ちました。(低速で移動する被写体の場合は、特に問題なく、どちらかといえば容易に流し撮りできます。)
Olympusのサイトによると、OM-D E-M5 Mark IIのファームウェアVer.2.0が11月に公開される予定だそうで、その追加項目に、「肉眼に近い見えを実現するOVFシミュレーションモード」というのがあるそうです。このファームウェアを適用すると上述のような、「被写体が追従してくれない」問題が解消されるかもしれません。

高感度耐性に関しても、OM-D E-M5 Mark IIは期待したほどではなく、RAWで撮影した画像をPhotosでノイズ除去を試みたものの、思い通りにノイズが除去できない状況です。上の画像はISOが1250ですが、暗部に高感度ノイズが現れています。ノイズが目立たないように補正してありますが、気になるレベルです。

翌日は午前から忙しくなるので、決勝終了後のコンサート会場へ向かうことなく、Jubilee Bridgeを渡ってRaffles PlaceでMRTに乗車し、早めにホテルに戻りました。
Singapore GP 2015 Day 6 (Monday) — From Singapore To Malaccaへと続く。